Cánh tay robot gắp đồ vật đang dần trở thành một phần không thể thiếu trong các ngành công nghiệp hiện đại. Nhưng bạn đã bao giờ tự hỏi, những cánh tay robot này hoạt động như thế nào và tại sao chúng lại quan trọng đến vậy? Hãy cùng Mykingdom STEAM khám phá 5 điều thú vị về cánh tay robot gắp đồ vật mà có thể bạn chưa biết!
Cánh tay robot gắp đồ vật là gì?
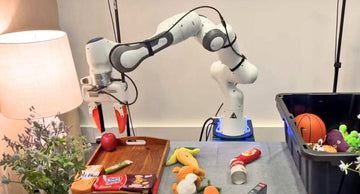
Cánh tay robot gắp đồ vật, hay còn gọi là robot pick and place, là một hệ thống tự động được thiết kế để lấy và đặt các vật thể từ vị trí này sang vị trí khác với độ chính xác cao. Chúng thường được sử dụng trong các dây chuyền sản xuất để tăng năng suất và giảm thiểu sai sót.

Cấu tạo cơ bản của cánh tay robot
Một cánh tay robot thường bao gồm các bộ phận chính như:
-
Cánh tay cơ khí: Đảm nhiệm việc di chuyển và thao tác.
-
Bộ điều khiển: Xử lý thông tin và điều khiển hoạt động của robot.
-
Cảm biến: Giúp robot nhận biết môi trường xung quanh và xác định vị trí của vật thể.
-
Tay gắp (End of Arm Tooling - EOAT): Phần tiếp xúc trực tiếp với vật thể, có thể được tùy chỉnh để phù hợp với nhiều loại vật thể khác nhau.
Ứng dụng đa dạng trong công nghiệp
Cánh tay robot gắp đồ vật được ứng dụng rộng rãi trong nhiều lĩnh vực như:
Ứng dụng trong công nghiệp
-
Gắp và lắp ráp linh kiện điện tử.
-
Sắp xếp và đóng gói sản phẩm.
-
Thực hiện các công việc nguy hiểm (ví dụ: xử lý chất thải độc hại).

Ứng dụng trong y tế
-
Hỗ trợ phẫu thuật chính xác.
-
Vận chuyển và sắp xếp dụng cụ y tế.
-
Hỗ trợ người khuyết tật trong sinh hoạt hàng ngày.
Ứng dụng trong giáo dục và nghiên cứu
-
Công cụ trực quan để học về cơ học, điện tử và lập trình.
-
Nền tảng để phát triển các ứng dụng robot phức tạp hơn.
Ứng dụng tiềm năng trong tương lai
-
Phục vụ trong gia đình.
-
Hỗ trợ trong nông nghiệp.
-
Tham gia vào các hoạt động khám phá vũ trụ.
Lợi ích khi sử dụng cánh tay robot gắp đồ vật
Việc tích hợp cánh tay robot vào quy trình sản xuất mang lại nhiều lợi ích như:
-
Tăng năng suất, giảm lỗi trong sản xuất.
-
Tiết kiệm nhân lực, giảm chi phí.
-
Bảo vệ an toàn lao động.
-
Và trong học tập, giúp trẻ hiểu sâu hơn về STEAM, học kỹ năng lập trình sớm.
Các bước làm cánh tay robot gắp đồ vật đơn giản cho bé
Khám phá và chế tạo cánh tay robot là một hoạt động cực kỳ hấp dẫn giúp trẻ vừa học kiến thức kỹ thuật, vừa rèn luyện kỹ năng thực hành.
Dưới đây là các bước cơ bản mà bé có thể thực hiện tại nhà hoặc trong lớp học Mykingdom STEAM:
-
Bước 1: Thiết kế ý tưởng. Vẽ sơ đồ hoặc mô hình đơn giản: cánh tay sẽ dài bao nhiêu, gắp bằng kẹp hay hút, có mấy khớp chuyển động?
-
Bước 2: Lắp khung và khớp nối. Sử dụng các chi tiết LEGO hoặc vật liệu lắp ráp để tạo phần “xương tay” và các khớp có thể xoay/gập.
-
Bước 3: Gắn động cơ và cảm biến. Lắp động cơ để tay cử động, cảm biến để nhận diện vật thể hoặc khoảng cách.
-
Bước 4: Lập trình hoạt động. Dùng phần mềm kéo-thả như LEGO SPIKE App để cài đặt: khi nào gắp, khi nào nhả, di chuyển hướng nào.
-
Bước 5: Thử nghiệm và tinh chỉnh. Kiểm tra xem robot có hoạt động như mong muốn không, rồi điều chỉnh thiết kế hoặc chương trình cho tối ưu.
Các bước trên có thể áp dụng dễ dàng trong lớp học hoặc ở nhà với bộ LEGO Education LEGO SPIKE Prime, LEGO Mindstorms EV3, LEGO WeDo 2.0 – giúp bé vừa học lập trình vừa sáng tạo không giới hạn!
Cánh tay robot gắp đồ vật không chỉ là một công cụ hữu ích trong công nghiệp mà còn là nguồn cảm hứng tuyệt vời cho việc học tập và khám phá. Hãy cùng Mykingdom STEAM đồng hành trên hành trình khám phá thế giới công nghệ đầy thú vị này!





